

Kilka prostych obliczeń siły i energii zapewni dynamicznym hamulcom sprężynowym niezawodność, powtarzalność i długotrwałą skuteczność działania
Dynamiczne hamulce sprężynowe spotyka się w dwóch wersjach. W jednej wersji siła hamowania działa jeżeli zasilana jest cewka hamulca elektrycznego. Natomiast w drugiej hamowanie jest uaktywnione przy odłączeniu cewki od źródła zasilania. Hamulce działające przy włączonym zasilaniu zabezpieczają ładunek, jeżeli określone napięcie zasila cewkę, natomiast tracą siłę hamowania w przypadku awarii zasilania. Hamulce włączające się przy braku zasilania są domyślnie bezpieczne. Jakikolwiek zanik zasilania powoduje włączenie hamulca utrzymującego ładunek poprzez zadziałanie sprężyny. W dodatku hamulec aktywowany przy przerwie w zasilaniu jest bezpieczniejszy i preferowany dla maszyn przemieszczających ładunki pionowo.
Włączanie i wyłączanie się hamulca trwa przez pewien skończony czas, tak, że równania, przy pomocy których oblicza się zwłokę czasową, określają końcową pozycję, z której część urządzenia przemieści się, lub pozycję, w której ta część się zatrzyma. Przy pomocy równań oblicza się też czas, w którym wał zacznie lub skończy swój ruch na polecenie sygnału elektrycznego. Dwie możliwości dostępne w procesie wyboru hamulca określają, czy maszyna zatrzyma się po upływie określonego czasu lub po przebyciu określonej drogi.
Parametry wyboru dla najgorszego przypadku
Przed określeniem bezwładności hamulca, momentu hamującego i zwłoki czasowej należy rozważyć wskazane niżej parametry, a następnie z katalogu producenta, w oparciu o te parametry, wybrać rodzinę hamulców.
- Tryb działania hamulca: przy zasilaniu włączonym lub wyłączonym
- Zakres temperatur
- Zakres napięcia lub natężenia prądu dla cewki hamulca
- Dopuszczalny wzrost temperatury cewki
- Cykl pracy ? ciągły albo przerywany
- Ograniczenia albo preferencje dla montażu hamulca mechanicznego
- Wymagania dotyczące operacji zatrzymywania: tylko awaryjne dynamiczne, tylko utrzymywanie statyczne lub dynamiczne zatrzymanie w każdym cyklu (wymagana jest całkowita liczba dynamicznych zatrzymań dla aplikacji)
- Maksymalna prędkość i kierunek rotacji
- Pozycja montażowa hamulca: pionowa lub pozioma
- Moment hamowania lub tarcia systemu
- Bezwładność systemu
- Dopuszczalny czas zmniejszenia prędkości i dopuszczalna liczba obrotów wału po wydaniu polecenia zatrzymania (przeregulowanie)
- Tolerancja hamowania z cyklu na cykl i jej odchylenia w miarę upływu czasu
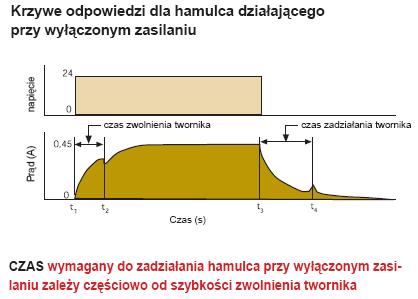
Praca hamulca działającego przy wyłączonym zasilaniu
Po pierwsze, należy rozważyć tryb pracy przy wyłączonym zasilaniu. Hamulec włącza się i zatrzymuje ładunek w ciągu kilku milisekund po tym, jak cewka hamulca otrzymuje polecenie zwolnienie lub wyłączenia. Producenci podzespołów hamulcowych zwykle dołączają wykres zależności funkcyjnej opóźnienia czasowego od prądu przepływającego przez cewkę. Czas zwłoki hamowania pomiędzy odłączeniem cewki i zatrzymaniem ładunku zależy od całkowitej bezwładności systemu, której składnikami są bezwładność ładunku i bezwładność hamulca.
Czas zatrzymania stanowi sumę czasu odłączenia cewki i czasu potrzebnego na opóźnienie pojazdu:
Ts = Te + Td
Gdzie:
Ts = czas upływający do zatrzymania [s]
Te = czas pobudzenia [s]
Td = czas zmniejszenia prędkości (opóźnienia) [s]
Szybkość opóźnienia, d?/dt [rad/s2), zależy od całkowitego momentu skręcającego wymaganego do zatrzymania ładunku i od bezwładności systemu:
d?/dt = Tt/Js
Gdzie:
Tt = całkowity moment skręcający [Nm]
Js = bezwładność systemu = Jl + Jb (bezwładność ładunku + bezwładność hamulca) [Nm/s2]
Typowy czas zadziałania hamulca różni się od czasu jego zwolnienia.
Zatrzymanie się w określonym czasie
Przede wszystkim należy wyznaczyć moment potrzebny do zatrzymania bezwładności systemu w czasie równym połowie czasu, podczas którego serwomotor może samodzielnie i bezpiecznie zatrzymać ładunek. Na tym etapie analizy znana jest tylko bezwładność ładunku, tak więc zgodnie z regułą kciuka należy dodać około 25 procent do bezwładności ładunku w celu określenia bezwładności wirnika hamulca, to znaczy Js = 1,25Jl. Taka informacja umożliwi dobór odpowiedniego hamulca. Po obliczeniu bezwładności hamulca, karty danych dostawcy dostarczą specyfikacji czasu odpowiedzi dla danego hamulca. Równanie dla przybliżonego momentu obrotowego Tt ma postać:
Tt = 0,1047Js(d?/dt)
Gdzie:
0,1047 jest współczynnikiem przeliczeniowym, który zamienia rad/s w obr./min
Js = bezwładność systemu, 1,25Jl [Nm/s2]
Jeżeli opory systemu (Td) są znaczne, pomaga to w zmniejszaniu prędkości, tak, że odejmuje się od wartości momentu obrotowego hamowania:
Tb = Tt – Td
Z drugiej jednak strony, jeżeli nadmiarowy moment obrotowy powstaje podczas zmniejszenia prędkości, to moment obrotowy hamowania zwiększa się:
Tb = Tt + Td
Następnie należy wybrać odpowiedni hamulec z katalogu i dla nowej wartości bezwładności systemu przeprowadzić obliczenia rzeczywistego momentu bezwładności ładunku i bezwładności wybranego wirnika hamulca. Określić, czy wybrany hamulec jest w stanie zapewnić moment hamujący. Jeżeli wyniki nie okażą się zadowalające, należy zastosować nowy, większy rozmiar. Jeżeli teraz wyniki będą zadowalające, należy obliczyć czas zmniejszania prędkości dt stosując nową wartość całkowitej bezwładności systemu:
dt = 0,1047Js(d?/Tt).
Zatrzymanie się na określonej odległości
Druga opcja to dobór hamulca, który zatrzyma ładunek na określonej drodze. W pierwszym etapie należy dobrać hamulec spełniający wszystkie określone powyżej kryteria, a następnie obliczyć całkowitą dopuszczalną odległość, którą może przebyć ładunek po otrzymaniu sygnału nakazującego zatrzymanie. Ta odległość to suma odległości przebytej podczas włączania się układu hamulcowego i odległości, na której następuje obniżanie prędkości ładunku. Odległość całkowita S podana w wykresie producenta (Rys. 3) określona jest wzorem:
S= [(t4-t3)+(t5-t4)/2]?/60
Jeżeli odległość nie spełnia wymagań, należy wybrać kolejny zestaw hamulcowy i powtórzyć obliczenia lub skonsultować się z producentem hamulców odnośnie zmiany lub dodania obwodu tłumienia łukowego w celu przyspieszenia czasu zanikania. Po stwierdzeniu, że przebyta droga ma wartość akceptowalną, oblicza się absorpcję energii.

Absorpcja energii
Powyższe obliczenia odnoszą się wyłącznie do pojedynczego cyklu. Należy teraz ocenić, czy hamulec podczas pełnej operacji jest w stanie rozproszyć energię kinetyczną absorbowaną w pojedynczym cyklu. Dodatkowo powtarzające się cykle generują ciepło, które cewka musi ciągle wytrzymać. Po pierwsze, należy obliczyć absorpcję energii w pojedynczym cyklu Eb:
Eb = 4,6(J?2)10-4 [J/cykl]
Jeżeli opór tarcia jest znaczny w porównaniu z momentem hamowania, należy zmodyfikować obliczenia energii o stosunek momentu hamowania do całkowitego momentu obrotowego:
Eb= [Tb/Tb +Td] [4,6(J?2)10-4] [J/cykl]
Jeżeli hamowanie przebiega stosunkowo szybko, należy pomnożyć Eb/cykl przez współczynnik cykliczny N:
Ebmin=[Tb/Tb +Td][4.6(J?2)10-4](N) [J/min]
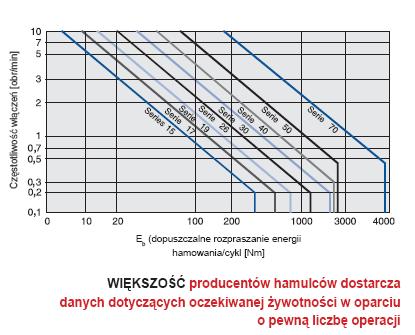
Teraz należy porównać obliczone wartości energii na cykl i energii na minutę z wartościami podanymi w karcie danych produktu. Wartości powinny być równe lub mniejsze od danych katalogowych, aby mogły zapewnić przetrwanie hamulców w ciągu długiego okresu eksploatacji. Większość producentów podaje dane dotyczące zużywania się hamulców, co pomaga w określeniu oczekiwanej żywotności operacyjnej z uwzględnieniem przewidywanej liczby całkowitych cykli operacyjnych. Zwykle określa się to równaniem:
Tn = Te/Tc
Gdzie:
Tn = żywotność bezobsługowa w cyklach
Te = całkowita dopuszczalna absorpcja energii [J]
Tc = obliczona energia zaabsorbowana w pojedynczym cyklu [J/cykl]
Korekta końcowa
Wszystkie systemy hamulcowe, działające w oparciu o cewkę i przeznaczone do hamowania dynamicznego, mogą być też stosowane w statycznych systemach utrzymywania ładunku. Czynniki zużycia dla materiałów ciernych mają większe znaczenie dla trybów dynamicznych, tak, że we wszystkich przypadkach producent części układów hamulcowych powinien zweryfikować ostateczny wybór. W danych katalogowych nie zawsze są dostępne odnośne informacje i dane (łącznie z niektórymi inżynierskimi jednostkami miary), które mogą okazać się krytyczne. Na przykład, pewne informacje odnoszące się do materiałów ciernych są prawnie zastrzeżone, a dane katalogowe i wykresy dotyczące żywotności są obliczone i zebrane w wyniku badań laboratoryjnych, przeprowadzonych w optymalnych warunkach testowych. Dzieje się tak dlatego, że nie wszystkie szczegóły pracy instalacji w warunkach rzeczywistych można przewidzieć i ocenić. Obliczenia wytwórcy mogą wskazywać, że dobór dokonany przez nabywcę będzie się charakteryzował dłuższą żywotnością operacyjną niż oczekiwana na początku. Zamiast tego dane producenta mogą wskazywać, że kolejne wyższe charakterystyki stanowią optymalny wybór zestawu hamulców dla maszyny nabywcy. W większości przypadków producent komponentów nie pobiera opłaty za taką usługę, a w rezultacie zamówienie u niego weryfikacji jest mniej kosztowne i przy okazji skraca czas projektowania.
John Pieri
Dyrektor Linii Produktów w Danaher Motion
w Wood Dale, Illinois


