

Pętle sterujące wyposażone w człony proporcjonalne (P), całkujące (I) oraz różniczkujące (D) stały się standardowymi układami funkcyjnymi sterowników ruchu. Wiele najnowszych sterowników ma również funkcje sprzężenia do przodu. Typowa pętla sprzężenia może łączyć trzy człony wzmacniające P, I oraz D oraz dwa układy wzmocnienia sprzężenia do przodu. Aby zapewnić prawidłową pracę takiego systemu,, trzeba żonglować wieloma wartościami wzmocnienia. Na przykład, w systemach hydraulicznych do każdego kierunku ruchu ? to jest wysuwania lub wciągania elementu wykonawczego ? należy zastosować inną wartość wzmocnienia, które ponadto powinno mieć znaną nastawę i być dostosowane do potrzeb. Nietrudno zrozumieć, dlaczego najczęściej zadawane pierwsze pytanie brzmi: ?Jakich użyć wartości wzmocnień??.
Podstawy dostrajania
Rozpocznij nastawiając wzmocnienie członu proporcjonalnego na poziomie wystarczająco dużym, aby zapewnić prawidłową odpowiedź systemu. Następnie zmień wzmocnienie układu całkującego w celu usunięcia uchybów ustalonych, różnic pomiędzy wartościami aktualną i docelową, które nie zostaną wyeliminowane za pomocą członu proporcjonalnego. Później ustaw czynnik różniczkujący w celu dodania tłumienia umożliwiającego przyspieszenie pracy systemu.
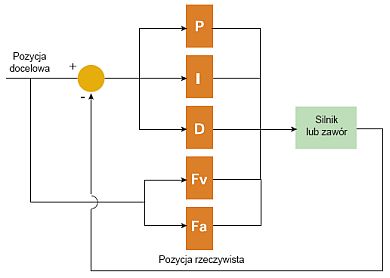
TYPOWA struktura pętli sterującej zawierającej czynniki proporcjonalne, całkujące oraz różniczkujące z czynnikami sprzężenia do przodu prędkości i przyspieszenia
Te praktyczne reguły nie uwzględniają faktu, że zmiana jednego ze wzmocnień PID oznacza konieczność zmiany obu pozostałych. Na przykład zwiększenie wzmocnienia czynnika proporcjonalnego w krytycznie wytłumionym systemie będzie zwykle wymagać zwiększenia wzmocnienia układów całkujących i różniczkujących. Zaniedbanie odpowiedniej regulacji wzmocnień układów całkującego i różniczkującego będzie skutkować niedostatecznym tłumieniem systemu, który przekroczy docelowe wartości położenia lub prędkości. Zdobycie wyczucia w ocenie wzajemnego wpływu wzmocnień PID zajmuje zwykle trochę czasu.
Regulacja wspomagana wykresami
Zdolność kreślenia żądanego (docelowego) ruchu w odniesieniu do aktualnego ruchu, z wysoką rozdzielczością czasową (na poziomie milisekund) to pewny sposób dostrajania systemu w procesie interaktywnym. Wykres słabo zestrojonego systemu ukaże profile ruchu aktualny i docelowy, różniące się w każdym punkcie czasowym. I odwrotnie, wykres dobrze zestrojonego systemu ukaże nachodzące na siebie aktualny i docelowy profil ruchu. Nawet, jeżeli nie jest jasne, co robią różne wzmocnienia sprzężeń PID oraz sprzężeń do przodu, łatwo ocenić, czy dokonana zmiana spowodowała zmniejszenie, czy zwiększenie błędu. Dostrajanie systemu w ten sposób może być bardzo czasochłonne. W miarę nabywania doświadczeniamożna nauczyć się interpretować wykresy, aby szybko znaleźć najlepsze rozwiązanie.
Ulepszenie kalibracji
Wiele sterowników ruchu ewoluowało w kierunku kalibracji metodą prób i błędów za pomocą automatycznego obliczania wzmocnień PID oraz sprzężeń do przodu, po przeanalizowaniu jednego lub dwóch profili ruchu. Sterownik mógłby analizować odpowiedź krokową, odpowiedź na rozciągnięty przebieg sinusoidalny lub ruch arbitralny, do przeprowadzenia obliczeń wykorzystując metodę najmniejszych kwadratów. Techniki te tworzą model lub funkcję transmitancji ? oszacują pozycję ściśle odpowiadającą aktualnej lokalizacji uzyskanej z użyciem takich samych sygnałów sterujących napędów, zarówno w systemie rzeczywistym, jak i w modelu.
Po stworzeniu dokładnego modelu systemu obliczane są wzmocnienia sprzężenia do przodu. W rzeczywistości funkcja transmitancji sprzężenia do przodu stanowi odwrotność funkcji transmitancji elementu inicjującego.
Zanim będzie można obliczyć wzmocnienia układów PID, potrzebny jest jeszcze jeden czynnik ? żądana odpowiedź. Ideałem byłaby możliwość określenia żądanych wyników bez troszczenia się o sposoby ich osiągnięcia. Eliminuje to z czynności dostrajania większość pracy polegającej na zgadywaniu, gdyż niewiele osób może sobie wyobrazić, jak przesuwają się zera i bieguny pracy systemu ze zmianami wzmocnień członów PID.
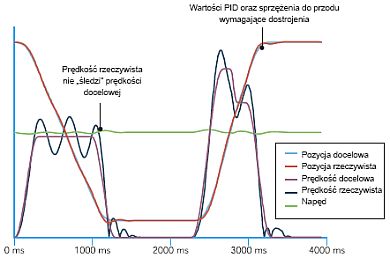
RZECZYWISTA prędkość w słabo dostrojonym systemie może nie ?śledzić? odpowiednio prędkości docelowej, w wyniku powstają widoczne odchylenia pomiędzy ich profilami ruchu
Tworzenie matematycznego opisu modelu
Dokładne obliczenie modelu systemu stanowi najtrudniejszą część obliczeń wzmocnień członów. Identyfikacja systemu metodą najmniejszych kwadratów wymaga zdobycia danych z wyjść sterujących oraz aktualnej pozycji jako funkcji czasu. Dane te są wykorzystywane do obliczania współczynników przyjętych założeń dla modelu, wyrażonych w postaci równania różniczkowego, z aktualnie oszacowanymi obliczeniami będącymi funkcją wyjścia sterującego oraz prędkości pochodzących z poprzedniej aktualizacji.
Równanie różniczkowe dla modelu prostego systemu inercyjnego ma postać:
Est(n) = A1?Est(n-1)+B1?u(n-1)
gdzie
-
Est jest macierzą oszacowanych szybkości, indeksowaną okresami aktualizacji
-
A1 i B1 to współczynniki określone metodą najmniejszych kwadratów
-
u(n) ? wyjście sterujące dla indeksu aktualizacji n
System dwubiegunowy może wyglądać następująco:
Est(n) = A1?Est(n-1)+A2?Est(n-2)+B1?u(n-1)+B2?u(n-2)
W tym przypadku oceniana aktualna prędkość jest funkcją ostatnich dwóch szacowanych prędkości oraz ostatnich dwóch wyjść sterujących. W miarę wzrostu złożoności modelu będzie się zwiększać liczba współczynników A i B. W identyfikacji systemu metodą najmniejszych kwadratów obliczane są współczynniki A i B w celu minimalizacji sumy kwadratów odchyleń pomiędzy prędkościami rzeczywistą i szacowaną w każdym przedziale próbki danych. Uogólniając, równanie identyfikacji systemu metodą najmniejszych kwadratów, znajdujące zastosowanie dla pełnego profilu ruchu ma postać:
?:=(?T??)-1??T?y
-
? jest macierzą zawierającą wynikowe współczynniki A i B
-
Y jest macierzą rzeczywistych prędkości dla każdego okresu n
-
? jest macierzą ostatnich rzeczywistych prędkości oraz wyjść sterujących dla każdego okresu n
Formuła identyfikacji systemu metodą najmniejszych kwadratów wygląda prosto, lecz w rzeczywistości wymaga odwracania i mnożenia ogromnych macierzy. Nie stanowi to problemu, gdy obliczenia mogą być przeprowadzone na komputerze. Korzyścią wynikającą z tej metody jest brak podmiotowej analizy danych. Sygnał sterujący może być arbitralny. Współczynniki A1… An oraz B1… Bn są statystycznie dokładne, gdyż metoda najmniejszych kwadratów znajduje wartości współczynników zapewniające najlepsze dopasowanie. Można stosować ruchy z otwartą lub zamkniętą pętlą sprzężenia do zbierania wartości sterujących w zależności od rzeczywistych danych o położeniu. Jest to przydatne podczas prób dostrajania dwóch powiązanych razem osi, ponieważ system może być na początku dostrojony ogólnie, aby obie osie pokrywały się całkowicie, a następnie, w celu uzyskania lepszych wartości wzmocnień czynników PID oraz sprzężenia do przodu, można zastosować identyfikację systemu metodą najmniejszych kwadratów.
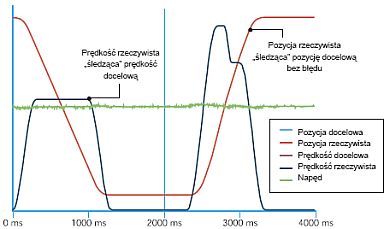
W SYSTEMIE, który został zestrojony, profile ruchu prędkości rzeczywistej oraz docelowej będą się pokrywać
Sprzężenia do przodu
Wzmocnienia uzyskane przez mnożenie docelowej prędkości i przyspieszenia w celu przewidywania stanu wyjścia sterującego wymaganego do uzyskania żądanej odpowiedzi ? to sprzężenia do przodu. Docelowa prędkość i przyspieszenie są wytwarzane w każdym odcinku czasowym przez funkcje generatora docelowego lub profilu ruchu w sterowniku ruchu. Dobry generator docelowy będzie wytwarzał gładki profil ruchu pomiędzy żądanymi pozycjami lub prędkości bez nieciągłości podczas przyspieszania lub w sygnałach sterujących.
W warunkach idealnych wzmocnienia sprzężenia do przodu są odwrotnością modelu systemu, określając dla przyspieszenia, prędkości lub pozycji następujące związki:
-
wartość docelowa ? sprzężenie do przodu ? funkcja transmitancji systemu = wartość rzeczywista
W doskonale zestrojonym systemie różnice pomiędzy wartościami docelowymi a rzeczywistymi wartościami prędkości, położeń i przyspieszeń znoszą się. Aby to osiągnąć, sprzężenie do przodu musi być odwrotnością funkcji transmitancji.
Przykład
Rozważmy system z funkcją transmitancji G/(t*s+1). Jest to funkcja transmitancji prostego systemu prędkości z pojedynczą stałą czasową ?t? oraz wzmocnieniem systemu ?G? (w metrach na sekundę na wolt. Odwrotnością tej funkcji transmitancji jest (t*s+1)/G. Skutkuje to sprzężeniem do przodu dla prędkości równym 1/G oraz sprzężeniem do przodu dla przyspieszenia równym t/G. Nawet, gdy model odbiegnie o 10%, człony sprzężenia do przodu zapewnią większość sygnałów sterujących, a czynniki PID pętli sterującej będą wymagane jedynie do skorygowania pozostałych 10% błędu. Sprzężenie do przodu wykona większość pracy, a system będzie zarówno precyzyjny, jak i stabilny ? śledząc bardzo dokładnie przy stosunkowo niskich wzmocnieniach PID.
Wykorzystanie teorii systemów sterujących
Biegun jest pojęciem z teorii sterowania ? odnosi się do odpowiedzi obiektu na pobudzenie. Każdy biegun ma częstotliwość odcięcia lub częstotliwość przejścia, przy której występuje tłumienie sygnału lub jego opóźnienie fazowe. W świecie rzeczywistym można to sobie wyobrazić jako liczbę zmian podczas wymuszania ruchu, na które system spóźnia się z odpowiedzią. W celu zapewnienia prawidłowej pracy maszyny należy unikać takich częstotliwości. W pobliżu częstotliwości bieguna efektywny sygnał podczas ruchu jest tłumiony o 3 dB i występuje jego opóźnienie fazowe o 45 stopni. Tłumienie rośnie ze wzrostem częstotliwości pracy. Z zasady najlepiej gdy system ruchu pracuje z częstotliwością równą 1/10 częstotliwości bieguna. Przy takiej częstotliwości może występować jedynie niewielkie tłumienie i opóźnienie fazy sygnału.
Przyjmując, że mogą być obliczone wzmocnienie systemu oraz częstotliwość odcięcia/biegun systemu, łatwo obliczyć parametry wzmocnienia układu PID oraz sprzężenia do przodu z zamkniętą pętlą systemu pozycjonującego.
Równania dla krytycznie tłumionej odpowiedzi są następujące:
Kp=3??^2/(G??)
Ki=?^3/(G??)
Kd=(3??-fa)/G??
Kv=1/G
Ka=1/(G??)
Gdzie:
-
Kp, Ki oraz Kd są wzmocnieniami członów PID
-
Kv oraz Ka to szybkość i przyspieszenie wzmocnień sprzężenia do przodu
-
G jest wzmocnieniem systemu w jednostkach prędkości/wolt impulsu pobudzającego, wzmocnienie jest obliczane jako część modelu systemu
-
? jest zaobserwowaną częstotliwością bieguna systemu w radianach na sekundę, jest to odwrotność stałej czasowej systemu, obliczana jako część systemu
-
? ? żądana częstotliwość bieguna w radianach na sekundę
Gdy ? wzrasta, system odpowiada szybciej. Trzeba zauważyć, że ? musi być większa niż 1/3 częstotliwości bieguna, w przeciwnym razie wzmocnienie układu różniczkującego będzie ujemne. Aby tego uniknąć, potrzebny jest inny zestaw równań dla odpowiedzi z nadmiernym tłumieniem. Korzyścią z zastosowania takiego podejścia matematycznego jest to, że można obliczyć wzmocnienia na tyle dokładnie, aby do wyregulowania dowolnych parametrów maszyny, które nie mogą być dostrojone automatycznie lub nie są brane pod uwagę, potrzebne było jedynie ich ostateczne doszlifowanie. Przeliczenie równań dla każdego modelu oraz typu odpowiedzi jest stosunkowo łatwe z pakietem matematyki symbolicznej.
KORZYSTAJĄC z programu Tuning Wizard, osoba strojąca system reguluje jego odpowiedź za pomocą paska suwaka. System reguluje wzmocnienie zgodnie z odpowiedzią przewidywaną przez model
Przykładem narzędzia ze świata rzeczywistego, które zostało opracowane w celu wprowadzenia omawianej teorii do praktyki, jest Tuning Wizard, zapowiedziany ostatnio przez Delta Computer Systems. Tuning Wizard zapewnia użytkownikowi wizualny interfejs sterowania zautomatyzowanym procesem dostrajania, z pojedynczym paskiem suwaka do wybierania żądanej odpowiedzi systemu. Za pomocą suwaka użytkownik instruuje Tuning Wizard o potrzebie przesunięcia biegunów systemu z miejsc wynikających z zachowawczej odpowiedzi systemu do skutkujących bardziej agresywną odpowiedzią. Pasek suwaka programu Tuning Wizard ułatwia użytkownikowi skoncentrowanie się na samej odpowiedzi, a nie na wzmocnieniach jako środkach jej uzyskania.
Automatyczne dostrajanie nie zawsze stanowi odpowiedź
Aby techniki automatycznego dostrajania mogły dobrze działać, potrzebne jest dobre dopasowanie rzeczywistego zachowania maszyny doprzyjętego przez oprogramowanie dostrajające. Charakterystyki maszyny, takie jak nieliniowości, naturalne rezonanse, martwe strefy i opóźnienia sprzężenia zwrotnego lub zakłócenia mogą ograniczyć ogólną skuteczność procesu automatycznego dostrajania. Techniki automatycznego dostrajania przybliżają więc nas do doskonale zoptymalizowanej pętli sprzężenia i pomagają w przeprowadzeniu szybszej kalibracji, pozostawiając nam dopieszczenie pewnych elementów w celu zoptymalizowania pracy przez układ sterowania, szczególnie w systemach gorszych od idealnych. Identyfikacja lepszego zachowania się systemu i ulepszone modelowanie stają się pomocne w miarę ulepszania techniki.

Współautor Peter Nachtwey jest prezesem Delta Computer
Systems w Vancouver, w stanie Washington, w USA
Autor: TEKST: PETER NACHTWEY


