

Kształt silnika odpowiada specjalnym potrzebom systemów napędowych wykorzystujących wentylatory tunelowe i napędy śrubowe
Bezszczotkowy silnik pierścieniowy o wysokiej sprawności, wykorzystujący opatentowaną technologię cewek elektromotorycznych, zmniejsza zużycie energii i zwiększa czas pracy bezzałogowych pojazdów DARPA (Defense Advanced Research Projects Agency – agencja federalna prowadząca badania dla Departamentu Obrony Stanów Zjednoczonych). Zastosowanie w pojazdach naziemnych i podwodnych silnika pierścieniowego pozwala wyeliminować przekładnie, umożliwia przenoszenie cięższych ładunków, a także poruszanie się z większą prędkością, na większe odległości lub przez dłuższy czas bez konieczności ponownego naładowania akumulatorów.
Techniczne rozwiązania silnika pierścieniowego
W ramach kontraktu z DARPA firma ThinGap Corp. (www.thingap.com) opracowuje bezszczotkowy silnik pierścieniowy (TG8250), który ma być stosowany w wielu rodzajach bezzałogowych obiektów latających (UAV), naziemnych (UGV) i podwodnych (UUV). Silnik zapewnia ciągłą moc właściwą rzędu 1,5 HP (1 HP=1,0139 KM) na jeden funt (467,7 g) i – jak twierdzi firma – jego kształt można dopasować do potrzeb. Jest mniej hałaśliwy od poprzednich wersji, oszczędza akumulatory i zapewnia efekt żyroskopowy, który zmniejsza drgania i stabilizuje UAV.
 – Silnik wygląda jak stalowy pierścień o średnicy zewnętrznej 209,55 mm połączony z wykonanym z żelaza pierścieniem wewnętrznym o średnicy wewnętrznej wynoszącej 190,5 mm i wysokości 35,56 mm – mówi Greg Graham, główny technolog w firmie ThinGap. – Pierścień z miedzianym rdzeniem tworzy stojan umieszczony wewnątrz pierścieni z żelaza.
– Silnik wygląda jak stalowy pierścień o średnicy zewnętrznej 209,55 mm połączony z wykonanym z żelaza pierścieniem wewnętrznym o średnicy wewnętrznej wynoszącej 190,5 mm i wysokości 35,56 mm – mówi Greg Graham, główny technolog w firmie ThinGap. – Pierścień z miedzianym rdzeniem tworzy stojan umieszczony wewnątrz pierścieni z żelaza.
– Prawdę mówiąc, urządzenie z wyglądu wcale nie przypomina silnika, gdyż tworzy go szeroki pierścień wewnętrzny otoczony drugim pierścieniem o grubości 9,49 mm – mówi Graham. – Ze względu na kształt silnik pierścieniowy stanowi dobre rozwiązanie dla wentylatorów tunelowych, napędu bezpośredniego i napędów śrubowych.
|
|
|
SILNIK PIERŚCIENIOWY (z graficznym przedstawieniem łopatek wentylatora), opracowany przez ThinGap, przeznaczony do zastosowania w pojazdach bezzałogowych |

Przy zastosowaniu silnika do napędu wentylatorów tunelowych, według Grahama, łopatki mieszczą się w obrębie wewnętrznej średnicy silnika pierścieniowego, a zewnętrzny pierścień staje się elementem obrotowym, nad którym można umieścić gondole lub struktury kompozytowe chroniące jego elementy mechaniczne. Dzięki pierścieniowi o większej średnicy silnik wywołuje efekt żyroskopowy stabilizujący aparat, podobnie jak robią to łopaty śmigłowca podczas lotu. Pola magnetyczne stojana i wirnika tworzą ustaloną centralną oś obrotu.
Zepchnięcie pola magnetycznego wirnika z jego toru w obrębie pola magnetycznego stojana powoduje powstanie siły magnetycznej, która przeciwdziała zepchnięciu. Graham twierdzi, że poprawia to stateczność i dzięki temu UAV może się przemieszczać w trudnych warunkach pogodowych. Zmniejsza to także wibracje i poprawia jakość przesyłanego przez pojazd obrazu.
Unikalna technologia
Silnik pierścieniowy w zasadniczy sposób różni się od konwencjonalnego, bezszczotkowego silnika prądu stałego ze względu na dwa elementy: cewkę i obracające się części silnika. W cewce silnika pierścieniowego (stojanie) uzwojenie mocy zastąpiono precyzyjnie obrobionymi arkuszami miedzianymi, uformowanymi w okrągłą cewkę, co umożliwia gęstsze upakowanie przewodników miedzianych niż w przypadku tradycyjnego drutu. Zespół cewki jest wolno stojącą konstrukcją, pozbawioną przekładek warstwowych stanowiących podpory struktur.
W zależności od tego, czy cewki zostały zwinięte równolegle czy szeregowo, zespół stojana może pracować przy napięciu od 50 V do 280 V lub przy trzech różnych stałych momentach obrotowych. Przy napięciu wynoszącym 72 V silnik działa ze sprawnością rzędu 75% (w przypadku silnika i urządzenia sterującego z wszystkimi 4 cewkami ułożonymi szeregowo) i daje moc wyjściową na wale wynoszącą 1200 W. Dzięki poczwórnej nadmiarowości w przypadku, gdy awarii ulegnie jedna cewka, silnik będzie nadal pracował. A ponieważ w cewce nie ma elementów wykonanych z żelaza, pole magnetyczne – zdaniem Grahama – nie ma wpływu na bezwładność, zmniejsza prądy wirowe powstające w przekładkach warstwowych i sprawia, że niedziałająca cewka wiruje swobodnie niczym łopaty wirnika śmigłowca w trybie autorotacji.
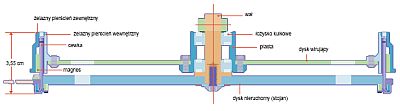
PRZEKRÓJ poprzeczny silnika pierścieniowego
Różne zastosowania
W ramach najnowszego kontraktu z DARPA trwają prace projektowe nad większym silnikiem, który ma spełnić wymagania projektu UGV dzięki stałej mocy wyjściowej rzędu 6,5 HP w zakresie od 500 obr./min do 5600 obr./min. Zdaniem Grahama krzywa momentu obrotowego silnika sugeruje, że zoptymalizowana moc wyjściowa osiągnie wartość 40 HP, czyli 30 kW. Jeśli chodzi o wykorzystanie go do napędu UGV, silnik osiągnie tak wysoki moment obrotowy przy małej prędkości, że w mniejszych pojazdach będzie można wyeliminować skrzynię biegów i układy przenoszenia napędu. W większych pojazdach nadal konieczne będzie zastosowanie skrzyni biegów.
Graham twierdzi, że dzięki eliminacji oporu magnetycznego silnik zapewni bardzo płynną i wolną od zacięć rotację, nawet przy małych prędkościach. Przewiduje się także bezpośrednie połączenie silnika pierścieniowego z kołem, co poprawi sterowanie i manewrowość.
Al Presher


