

Codziennie doświadczamy ze zdumieniem możliwości, jakie ma sterowanie w układzie zamkniętym w ulepszaniu działania i wydajności niewyobrażalnego zakresu systemów technologicznych. Sterowanie w układzie zamkniętym jest w samym sercu każdego nowoczesnego systemu mechatronicznego i w związku z tym jednoczesna optymalizacja sterowania z systemem fizycznym oraz jego czujnikami i urządzeniami pobudzającymi ma niebagatelne znaczenie. Niektóre systemy nie mogą wręcz działać bez sterowania w układzie zamkniętym, co sprawia, że stają się technologią ustawową. Ponadto sprzężenie zwrotne stosowane jest do regulowania prawie każdego układu w ciele ludzkim i stale zachodzi w systemach ekologicznych. Staje się to szczególnym wyzwaniem ze względu na fakt, że w systemie dynamicznym nie można wprowadzić zmian natychmiast, a właściwa decyzja kontrolna zastosowana w nieodpowiednim czasie może doprowadzić do katastrofy, podobnie jak utrata kontroli wynikająca z wysycenia urządzenia uruchamiającego. W miarę jak systemy inżynieryjne stają się coraz bardziej złożone, wiele z nich staje się coraz bardziej niebezpiecznymi. Układy sterowania muszą być bezpieczne i wytrzymałe, i aby w ogóle móc zacząć rozważać jakiekolwiek kwestie związane z eksploatacją, konieczne jest zagwarantowanie takich właściwości.
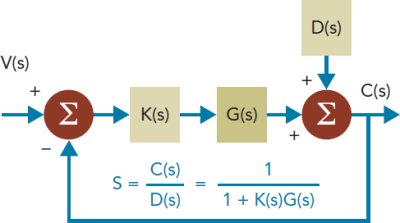
Funkcja przenoszenia sensytywności.
To doprowadziło mnie do przedmiotu niniejszego artykułu ? stabilności, która stanowi ostateczny nieprzekraczalny próg dla charakterystyki działania. Jest rzeczą oczywistą, że wytrzymałość uzyskana dzięki sterowaniu w układzie zamkniętym podlega pewnym ograniczeniom. We wszystkich systemach sterowania w układzie zamkniętym istnieje pewien nieprzekraczalny zakres wytrzymałości wymagający kompromisów. W każdym zakresie inżynierii niezwykle istotnym elementem jest zrozumienie fundamentalnych ograniczeń, w rozumieniu praktycznym i fizycznym, a nie jedynie o charakterze abstrakcyjnym i matematycznym. Obecnie, w znacznie większym stopniu niż kiedykolwiek do tej pory, praktyczne i realne konsekwencje sterowania muszą być w każdym przypadku brane pod uwagę, a zasady stanowiące ich podstawę dobrze zrozumiane. Jak informował Gunter Stein w swoim IEEE Bode Structure z roku 1989 (IEEE Control Systems Magazine, sierpień 2003 r. ? artykuł, z którym winien się zapoznać każdy inżynier kontroli), zdaniem Henrika Bode istnieje fundamentalne ograniczenie osiągalnej funkcji sensytywności S (patrz schemat). Rejestr wartości funkcji sensytywności dla układu sterowania w układzie zamkniętym typu LTI (system liniowy niezmienny w czasie) i SISO (single-input, single-output), integrowanego przez częstotliwość, zachowywany jest dzięki działaniu sprzężenia zwrotnego ? wynosi on zero dla stabilnych par urządzenie/kompensator oraz stanowi pewną stałą wartość dodatnią dla niestabilnych par.
Udoskonalenia sensytywności w ramach jednego zakresu częstotliwości dokonywane są kosztem pogorszenia czułości w innym zakresie częstotliwości, a koszt ten jest jeszcze wyższy, jeśli urządzenie jest niestabilne bez sprzężenia zwrotnego. Jednakże systemy fizyczne nie wykazują dobrej wierności charakterystyki częstotliwościowej poza pewną szerokością pasma. Wynika to między innymi z niepewnej lub niemodelowanej dynamiki w urządzeniu, z cyfrowych systemów sterowania, z ograniczeń mocy i braku liniowości. Integracja uzyskiwana jest w ramach pewnego skończonego zakresu częstotliwości, co jest ograniczeniem narzucanym przez fizyczny sprzęt komputerowy używany w pętli sterowania. Całe działanie projektu ze sprzężeniem zwrotnym oraz udoskonaleń sensytywności, jak również pogorszenia tej sensytywności, muszą zachodzić w ramach pewnego ograniczonego zakresu częstotliwości. Obniżanie czułości w systemie do zakłóceń w jednym zakresie częstotliwości dzięki sterowaniu w układzie zamkniętym wzmocni przebiegi przejściowe i oscylacje w innych częstotliwościach.
W swoim wykładzie Gunter Stein zastosował prawo zachowania Bode?a do bardzo dobrze znanego przykładu braku stabilności ? problemu tyczki balansującej. Długi sztywny kij łatwo jest balansować, lecz jego balansowanie staje się coraz bardziej utrudnione, w miarę jak staje się krótszy. Utrudniona kontrola w przypadku ludzi, obejmująca czas reakcji, opóźnienia nerwowomięśniowe i bezwładność kończyn, ogranicza kompensacyjny zakres częstotliwości. Strategią kontroli jest utrzymywanie wrażliwości na jak najniższym poziomie w ramach tego zakresu. Jednakże w miarę jak tyczka balansująca staje się krótsza, ma miejsce gwałtowny wzrost wrażliwości i w rezultacie nawet najdrobniejsze niedoskonałości w wykonaniu prowadzić będą do utraty stabilności. To właśnie przyczynia się do tego, że ludzie mają takie trudności przy balansowaniu krótszymi kijami.
Gunter Stein był zdania, że każdy inżynier kontroli i w rezultacie każdy inżynier mechatroniki, powinien zrozumieć tę niezwykle istotną uwagę wygłoszoną przez Bode?a, o której zupełnie zapomniano w nauczaniu zagadnień związanych z kontrolą. W pełni się z tym zgadzam.


