

Gdy Jesse Sullivan chce poruszyć protezą ręki, wystarczy, że o tym pomyśli. Okablowanie ? będące dziełem natury i cyfrowo sterowana kończyna ? najnowsze osiągnięcie techniki ? dokonują reszty
Brzmi to jak science fiction; bioniczna ręka, która po nasadzeniu na kikut amputowanej kończyny ma możliwości ruchowe i pełną sprawność prawdziwej ręki. Od czasów Luke Skywalkera bohaterowie filmów mocowali je sobie, przyglądając się im z nadzieją i wyginając palce w tańcu zwycięstwa, aby pokazać, że ich sztuczne kończyny są tak dobre, jak oryginalne dzieła natury.
Fantazja filmowa? Chyba nie
Lekarze z Instytutu Rehabilitacji w Chicago na początku tego roku zainicjowali nową technologię, montując Jesse Sullivanowi nowy bark. Sullivan, elektryk zatrudniony w firmie energetycznej w Tennessee, został porażony prądem, co spowodowało konieczność amputacji… obu rąk. Nagle stał się posiadaczem sztucznych kończyn, które umożliwiły mu poruszanie przegubem i przedramieniem, zginanie w łokciu, chwytanie dłonią, i, co najbardziej niewiarygodne ? umożliwiły czucie. Podobnie jak Luke Skywalker, Jesse potrzebował zaledwie kilku minut, by się przyzwyczaić do nowych kończyn, a stało się to możliwe dzięki zastosowaniu schematu połączeń neuronowych, przypominającego system stworzony przez naturę.
? Szczególnie ciekawe jest to, że Jesse po prostu może robić to samo, co robił przed wypadkiem. Jeżeli chce coś podnieść ze stołu lub sięgnąć po przedmiot znajdujący się nad głową, jego proces myślowy jest dokładnie taki sam, jak u innych ? zauważa Bill Hanson, prezes Liberating Technologies, Inc., firmy, która wyprodukowała sztuczne ręce Sullivana. Hanson dodaje, że dzięki temu, iż proteza jest tak podobna do prawdziwej ręki, Sullivan nauczył się posługiwania nią w ciągu zaledwie 90 minut.
? Tam w środku dzieje się bardzo wiele ? dodaje Kelvin Englehart, zastępca dyrektora Instytutu Inżynierii Biomedycznej Uniwersytetu Nowy Brunszwik, a zarazem współautor projektu. ? Dla użytkownika nauka oznacza jedynie krótkie przystosowanie.
Okablowanie ciała
Rzeczywiście, ?tam w środku? protezy Sullivana dzieje się wiele, ale najbardziej są w stanie docenić jej zalety ci, którzy wcześniej używali konwencjonalnych protez. Nawet najlepsze z dzisiejszych modeli protez z napędem nie są w stanie wykorzystać techniki ?od mózgudo- ręki?, zastosowanej w protezie Sullivana. Wymagają one od użytkowników powtórnego uczenia się najprostszych ruchów. Na przykład ludzie, którzy stracili rękę, mogą używać mięśni dwu? i trójgłowych do inicjowania ruchów ręki z napędem. Co więcej, wiele takich protez nie jest w stanie wykonać serii szybkich ruchów, wymagają one bowiem od użytkownika przejścia przez kolejne sekwencje skurczów mięśnia, kiedy ten chce na przykład po coś sięgnąć i obrócić tę rzecz.
? Jeżeli dostaniesz nową protezę, w której mięsień dwugłowy steruje pracą ręki, będzie to wymagało od ciebie długotrwałych ćwiczeń ? mówi Hanson.
I rzeczywiście, ten skomplikowany proces współpracy protezy z organizmem w dużym stopniu zainspirował naukowców do pracy nad protezą Sullivana. Todd Kuiken, doktor w dziedzinie inżynierii biomedycznej, jako pierwszy sformułował tę koncepcję po lekturze pewnego czasopisma medycznego. Było to ponad 20 lat temu. Myślał o tak zwanym ?powtórnym unerwieniu?, dostarczającym protezie większej liczby sygnałów sterujących. W taki sposób proteza mogła wykorzystywać istniejące połączenia nerwowe, nawet wówczas, gdy kończyna połączona z tymi nerwami została… amputowana.
Choć koncepcja taka wyglądała kusząco, lata doświadczeń nauczyły Kuikena, że bezpośrednie połączenie nerwów z urządzeniami protezy jest niemożliwe. Odkrył, że sygnały systemu nerwowego człowieka były o wiele za słabe, aby sterować takimi urządzeniami. Chcąc rozwiązać ten problem, Kuiken zdecydował się połączyć nerwy z użytecznymi zespołami mięśni, które mogłyby pełnić rolę wzmacniaczy słabych sygnałów, pochodzących od nerwów.
Trzeba przyznać, że metoda Kuikena jest unikalna i otwiera niezwykłe perspektywy w dotychczasowej historii protetyki. Kuiken połączył system powtórnego unerwienia z techniką czujników mięśniowo-elektrycznych i z tak zwaną ?cyfrową kończyną?, co w rezultacie pozwoliło Sullivanowi na wykonywanie czynności, które kiedyś byłyby dla niego niemożliwe.
? Tą ręką Jesse może zdjąć z głowy czapkę baseballową i z powrotem ją włożyć ? mówi Kuiken, dyrektor programów przeznaczonych dla osób po amputacji i prodziekan Instytutu Rehabilitacyjnego w Chicago. ? Może on dosięgnąć i wyjąć przedmioty z kredensu, a także uchwycić i przekręcić klamkę w drzwiach.
Co więcej, Sullivan może wykonywać wszystkie czynności, a szczególnie skomplikowane zadania, połączone z chwytaniem i obracaniem, jedynie poprzez wyrażenie takiej potrzeby. Jego świadome myśli biegną z mózgu przez nerwy do cyfrowego ramienia, które je interpretuje.
Niewiarygodne, ale Sullivan odzyskał też zmysł dotyku. ? Jeżeli dotkniesz jego klatki piersiowej, on odczuje to w swojej ?ręce?. To dobry początek do wyposażenia go w prawdziwe zmysłowe sprzężenie zwrotne. Teraz pracujemy nad tym, by Jesse był w stanie odczuwać również to, co ściska w dłoni ? opowiada Kuiken.

Silniki reagujące na myśli
Zanim jednak uzyskano takie rezultaty, Kuiken i inni badacze w wielu krajach wykonali długą i trudną pracę. Swój udział mieli także współpracujący z nimi podwykonawcy, jak na przykład Liberating Technologies. Najnowsza wersja ramienia Sullivana, udostępniona mu w lutym ubiegłego, roku ma ?zmotoryzowany? łokieć, bark, przegub, kość barkową i dłoń.
System ten, jako całość, używa sześciu silników, łącznie z jednym bezszczotkowym silnikiem na prąd stały, umieszczonym w łokciu. Silnik ten został skonstruowany przez Liberating Technologies, dwa silniki w sztucznej ręce stworzyła firma Kesling Co. z Chin, silnik w zginającym się przegubie zbudowano w Otto Bock Healthcare (Niemcy), a ten w sztucznym ramieniu zaprojektowali inżynierowie z Uniwersytetu Strathclyde (Szkocja).
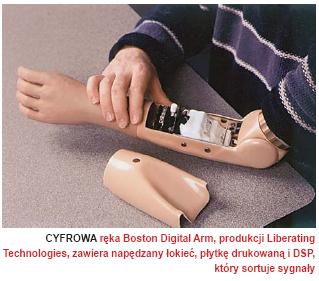
Wszystkie silniki reagują bezpośrednio na myśli Sullivana. Działanie urządzenia rozpoczyna się od świadomego polecenia Sullivana. Jeżeli, na przykład, pomyśli on o zaciśnięciu ręki, polecenie z jego mózgu przenosi się poprzez nerwy, jako prąd elektryczny o niskim napięciu, do zespołu mięśni w klatce piersiowej. Mięśnie klatki piersiowej są dla Sullivana najważniejsze, ponieważ jest to centrum, w którym nerwy z amputowanej ręki i ramienia zostały powtórnie połączone ze sobą lub zregenerowane podczas wykonanej wcześniej operacji. Ponieważ ta grupa nerwów nie została uszkodzona, może ona przekazać polecenie ?zacisnąć rękę? do mięśni w klatce piersiowej. Mięśnie klatki piersiowej kurczą się, a mięśniowo-elektryczne czujniki na skórze Sullivana wykrywają te skurcze (skurcze mięśni generują pole elektryczne), przesyłają je do wzmacniacza, a następnie do cyfrowego przetwornika sygnałów (DSP), który znajduje się w firmie Boston Digital Arm. Przetwornik interpretuje sygnał i wysyła polecenie do silnika ręki, który z kolei powoduje zaciśnięcie dłoni.
Wszystko to trwa ułamek sekundy. Wyzwaniem dla inżynierów było osiągnięcie takiej prędkości przesyłu sygnałów, która byłaby porównywalna z naturalną szybkością sygnałów nerwowych w ciele człowieka tak, aby pewna zwłoka między myślą Sullivana a ruchem jego ręki stała się praktycznie niezauważalna. Aby mogło to nastąpić, sygnały są przesyłane z czujnika mięśniowo-elektrycznego do złącza o średnicy około 4,5 cm za pośrednictwem wzmacniacza różnicowego i do cyfrowego przetwornika sygnałów (DSP). Przetwornik, pracujący na częstotliwości 20 MHz, sortuje jednocześnie jeden lub kilka sygnałów i wysyła polecenia do odpowiedniego silnika.
Po zakończeniu tych operacji odpowiedź ramienia musi być nie tylko szybka, ale i dokładna. Jeżeli Sullivan chce poruszyć nim silnie, bioniczne ramię musi zareagować w taki sam sposób.
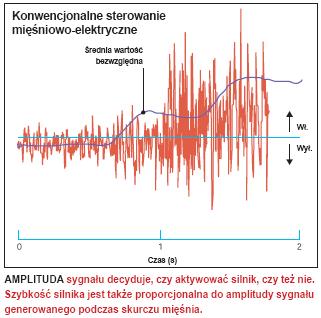
? Powinno mieć to charakter liniowy ? wyjaśnia Richard Weir, pracownik naukowy Centrum Medycznego Jesse Browna w Wirginii, profesor na Wydziale Inżynierii Biomedycznej Uniwersytetu Północno- Zachodniego i projektant rotatora ramieniowego. ? Silniejszy skurcz mięśni generuje mocniejszy sygnał elektryczny i w konsekwencji powoduje szybszy obrót silnika.
Interpretacja sygnałów nerwowych
Zrozumienie sygnałów ciała może jednak sprawiać inżynierom dużą trudność. Cyfrowy przetwornik sygnałów (DSP) musi być szybki i pojemny, a jego oprogramowanie powinno być zdolne do określenia, który silnik ma wykonać pracę, w jakim kierunku i jak szybko obrócić kończynę.
Rozwiązując problem sprzętu, Liberating Technologies wykorzystało przetwornik typu C2000 produkcji Texas Instruments (TI) zamiast konwencjonalnego mikrosterownika, ponieważ DSP dysponuje doskonalszymi możliwościami obliczeniowymi. ? DSP daje w tym przypadku znaczniejsze korzyści, szczególnie przy większej liczbie silników do sterowania, a także oferuje lepsze spakowanie i integrację ? zapewnia Chris Clearman, szef rozwoju biznesowego C2000 w TI.
Jednak procesy decyzyjne były w gestii oprogramowania zainstalowanego w C2000. Określenie, który silnik powinien zostać wprawiony w ruch, było prawdopodobnie najprostszą decyzją, ponieważ silniki były przypisane do określonych mięśni. Płytka drukowana o rozmiarach 5×15 cm wewnątrz Boston Digital Arm (cyfrowego ramienia Boston) zawiera sześć sterowników silników, z których każdy jest podłączony do osobnej grupy mięśni. Na przykład, jedna grupa mięśni klatki piersiowej może sterować ruchem przegubu, podczas gdy inna steruje chwytem dłoni.
Zadanie decydowania o kierunku i prędkości obrotu silników okazało się jednakże najbardziej kłopotliwe. Aby rozwiązać ten problem, inżynierowie z Uniwersytetu Nowy Brunszwik nawiązali współpracę z Kuikenem przy wdrażaniu nowych algorytmów rozpoznawania wzorca, które ?wypatrują? na powierzchni skóry sygnały płynące z czujników elektromiograficznych (EMG).
? Sygnały EMG mają charakter o wiele bardziej losowy niż sygnały, z którymi ma się zwykle do czynienia w procesach typowego projektowania inżynierskiego Stanowi to wielkie utrudnienie w pomiarach ? wyjaśnia Englehart z Uniwersytetu Nowy Brunszwik.
Ale i tym razem inżynierowie znaleźli sposoby jednoznacznej interpretacji sygnałów. Oprogramowanie Engleharta realizuje to przez ?przyglądanie się? sygnałom wytwarzanym przez mięśnie Sullivana podczas wykonywania zaplanowanych zadań, a następnie przez uczenie się.
? Kiedy Jesse stara się podporządkować sobie łokieć, przegub albo rękę, system ?przygląda się? pracy mięśni, a następnie wykorzystuje sieci neuronowe do nauki tych ruchów ? tłumaczy Englehart.
W oparciu o te wzory ? na podstawie umiejętności wyodrębniania właściwych sygnałów z szumu elektrycznego ? system przede wszystkim wykorzystuje amplitudę sygnału do określenia żądanej mocy silnika. Określa on także, który z dwudziestu pięciu ruchów ramienia jest tym najwłaściwszym, i to z dokładnością rzędu 96 procent, zgodnie z przewidywaniem Engleharta. Badacze zamierzają odczytać jeszcze więcej informacji z różnych charakterystyk sygnału (głównie częstotliwości), a następnie sporządzić mapę bardziej skomplikowanych ruchów ramienia. ? Danych są całe tony, a my wciąż próbujemy odnaleźć idealne sposoby ich posortowania. Mamy nadzieję, że w końcu uda się wykorzystać je do określenia, jaki rodzaj chwytu dłonią zamierza wykonać Jesse ? czy ma to być lekkie lub silne zaciśnięcie, czy na przykład chwycenie klucza ? mówi Kuiken.
Rozszerzanie koncepcji
? Ta ręka daje dwie korzyści ? mówi Kuiken. ? Daje więcej informacji sterujących i jest bardziej intuicyjna dla użytkownika.
Kuiken planuje wyposażenie protezy Jesse Sullivana w jeszcze większe możliwości. Chce zwiększyć wyczucie dotyku, a także sprawić, by nowe ?palce? Sullivana były bardziej zręczne. Ponieważ spostrzegł, że skóra wokół powtórnie unerwionych obszarów mięśni klatki piersiowej wytworzyła strefy wrażliwe na dotyk i sygnały z otoczenia, chciałby to wykorzystać do dostarczenia większego czucia w dłoni i ramieniu. Co więcej, wierzy, że w przyszłości może dać ręce większą swobodę i w końcu możliwość przebierania palcami.
? Zdecydowanie przybliżamy się do możliwości kierowania ruchami palców ? mówi Kuiken.
? To tak jak u Luke?a Skywalkera, z wyjątkiem tego, że Jesse… nie ma tej zręczności ? wtrąca Hanson. ? Ale pewnego dnia i to będzie możliwe i wcale nie będzie to odległa przyszłość.


